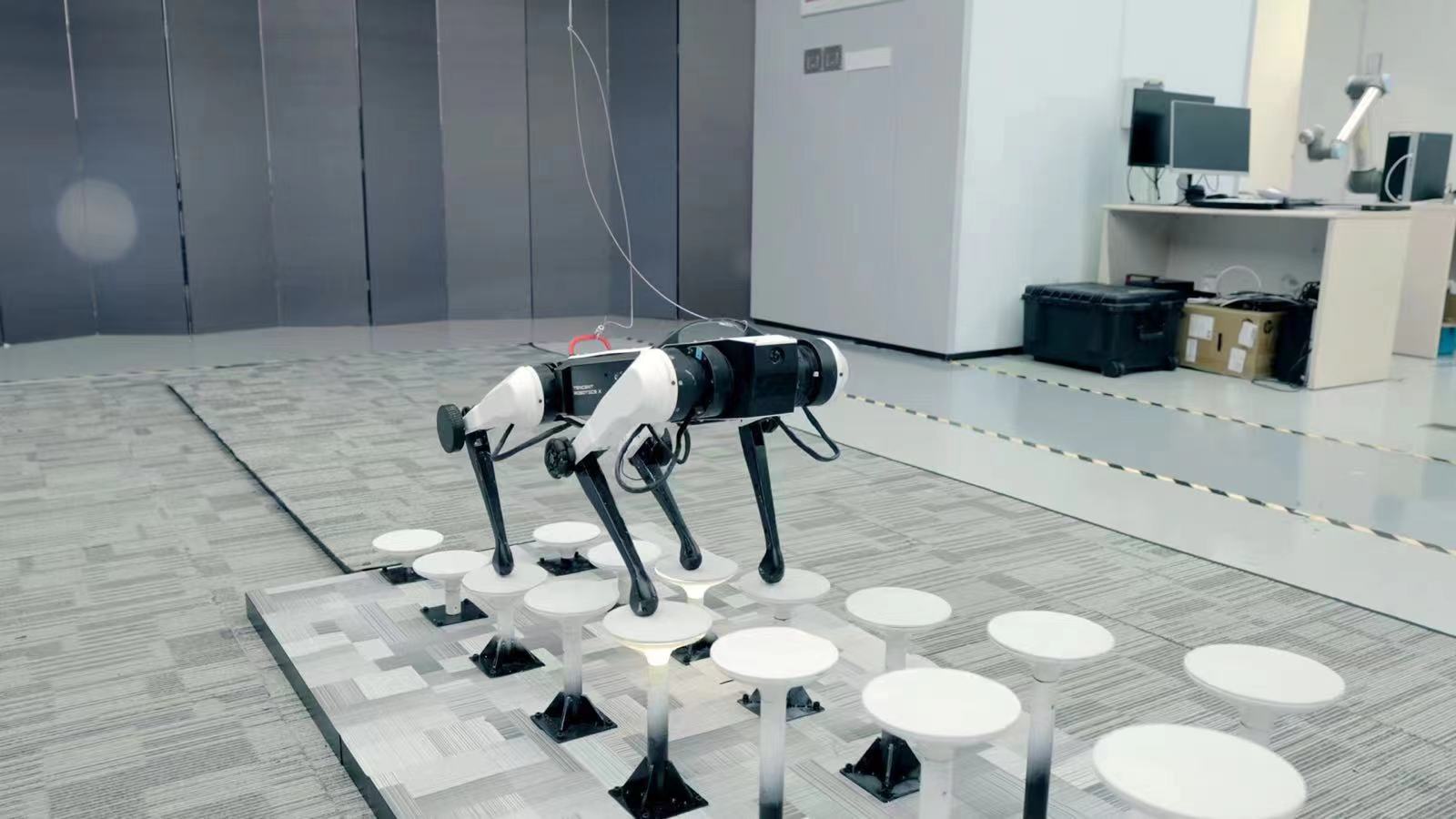
8月8日,腾讯正式发布Max二代机器人。记者获悉,Max能够在梅花桩上完成旋转踏步、单桩跳跃、双轮站立等高难度动作。同时,过桩速度达到“前辈”Jamoca的4倍。
依托于机器人视觉定位、地形识别、全向六自由度运动规划、高精度模型预测控制等技术,Max能够对复杂地形进行精确识别,并且根据地形实时想好步子,避免踩歪、打滑、摔倒等风险。通过梅花桩复杂地形场景,以及精确落点跳跃等条件设置,成功验证了Max对复杂地形的适应能力。
据了解,Max是由腾讯Robotics X实验室自研的多模态四足机器人,采用原创的腿轮一体的本体设计,实现了“崎岖路面走得稳,平坦路面跑得快”。相比一代,Max在视觉感知、轨迹规划、运动控制等方面实现技术创新,标志着腾讯在机器人灵敏运动研究上取得了新的突破。
目前,该实验室也正利用深度强化学习等AI技术,推进机器人智能研究,让机器人在虚拟环境中自主学习,更好地适应复杂环境的变化。
作为腾讯Robotics X实验室自研的多模态四足机器人移动技术平台,Max的相关新技术与算法同时具备良好的迁移性,为实验室研发其他类型的移动机器人、适配潜在应用场景沉淀技术与经验。
未来,腾讯 Robotics X实验室还将在机器人行业做全方位、多领域的探索,向人机共存、共创、共赢的未来不断迈进。